Let’s firstly see how Darknet construct a neural network. See at detector.c test_detector function, it construct a network by parsing the xxx.cfg file and xxx.weights file. In my case, they are yolo3-tiny.cfg and yolo3-tiny.weights
I am trying to understand Darknet source code that implements YOLO algorithm. First, I run the detector.
1 | ./darknet detect cfg/yolov3-tiny.cfg yolov3-tiny.weights data/dog.jpg |
Parse the argumenets
In main function, it goes to function test_detector according to the first argumentdetect.
1 | if (0 == strcmp(argv[1], "detect")){ |
Here is the architecture of neural network defined by yolov3-tiny.cfg
1 |
|
Now, let’s see how Darknet construct a nerual network. See detector.c test_detector function, it construct a network by parsing the xxx.cfg file and xxx.weights file. In my case, they are yolo3-tiny.cfg and yolo3-tiny.weights
Parse the configuration file
Sections in the file
The code to parse the yolo.cfg file is here:
1 | list *read_cfg(char *filename) |
for exmaple:
1 | [net] // '[' is a tag for a section, the type of current setion is '[net]' |
[net]
In section ‘[net]’, batch=1 is a option stored in kvp(option_list.c line 70) structure. Its key is batch, value is 1. Then this kvp object will be inserted into a node list (see it at option_list.c line76 & list.c line 40).
After parsing the yolo3-tiny.cfg file, We will get a section list; its size is 25. Because there are 25 \’[\’ tags in yolo3-tiny.cfg
In parse_network_cfg function, it parses the [net] section to get the params for the whole network.
1 | network *parse_network_cfg(char *filename) |
[convolutional]
Then parse the different sections.
1 | s = (section *)n->val; |
For the first [convolutional] section in the yolo3-tiny.cfg as follow, the darknet will construct a convolutional_layer using thess params (see function parse_convolutional in parse.c and function make_convolutional_layer in convolutional_layer.c)
1 | [convolutional] |
In this layer, there are 16 filters; the size of each filter is 3X3Xnum_channel; what is num_channel? well, the number of channels in a filter must match the number of channels in input volume, so here num_channel is equal to 3. The stride value for filters is 1, padding value is 1.
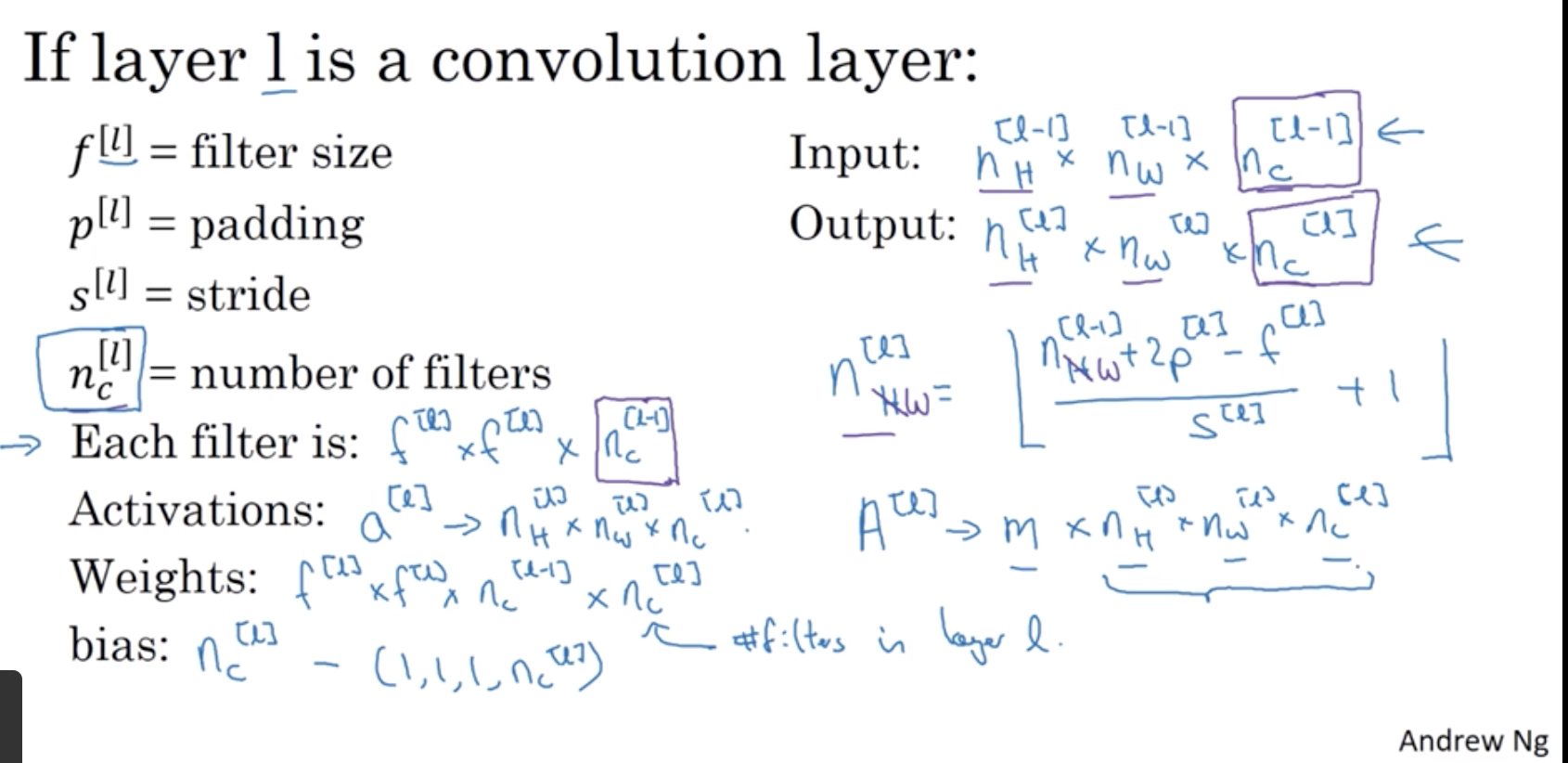
Let’s see how darknet calculate the output size of convolutional_layer by the input size(l.h) and filter params (l.size, l.pad, l.stride). There is a formula that shows how size of input volume relates to the one of output volume
1 |
|
As for yolo3-tiny.cfg, for this first convolutional_layer, its input size is 416 x 416 and channel is 3. So its ouput height is (416+2x1 - 3)/1 + 1 = 416, its output width is 416 too. What about its output channel? It equals to the number of filters (16).
1 |
|
So its output volume size is 416 X 416 X 16.
For a beginner, I strongly recommend these courses: Strided Convolutions - Foundations of Convolutional Neural Networks | Coursera and One Layer of a Convolutional Network - Foundations of Convolutional Neural Networks | Coursera
Now, we have 16 filters that are 3X3X3 in this layer, how many parameters does this layer have? Each filter is a 3X3X3 volume, so it’s 27 numbers tp be learned, and then plus the bias, so that was the b parameters. it’s 28 parameters. There are 16 filters so that would be 448 parameters to be learned in this layer.
1 |
|
Activation
In this convolution layer, it choose leaky ReLU as activation function. The function is defined as follow where α is a small constant.
$$
f(x)=\begin{cases}
αx,\quad x\leq 0 \\
x,\quad x>0
\end{cases}
$$
Still, I recommend this course for a beginner. Activation functions - Shallow neural networks | Coursera
There are forward_activation_layer and backward_activation_layer in Darknet. Both of them handle batch inputs.
For forward activation layer, leaky_activate is to computes f(x)
1 | static inline float leaky_activate(float x){return (x>0) ? x : .1*x;} |
For backward activation layer, leaky_gradient returns the slop of the function
1 | static inline float leaky_gradient(float x){return (x>0) ? 1 : .1;} |
[maxpool]
Maxpool layer is used to reduce the size of representation to speed up computation as well as to make some of the features it detects a bit more robust. Look at the tiny-yolo3.cfg
1 | [maxpool] |
1 | maxpool_layer make_maxpool_layer(int batch, int h, int w, int c, int size, int stride, int padding) |
This [maxpool] sections comes after the [convolutional] section. Its input size(416 x 416 x 16) equal to the output size of the former layer (416 x 416 x 16). The filter size is 2 x 2, stride is 2. Each time, the filter would move 2 steps, for a 4x4x1 input volume, its output is 2x2x1 volume.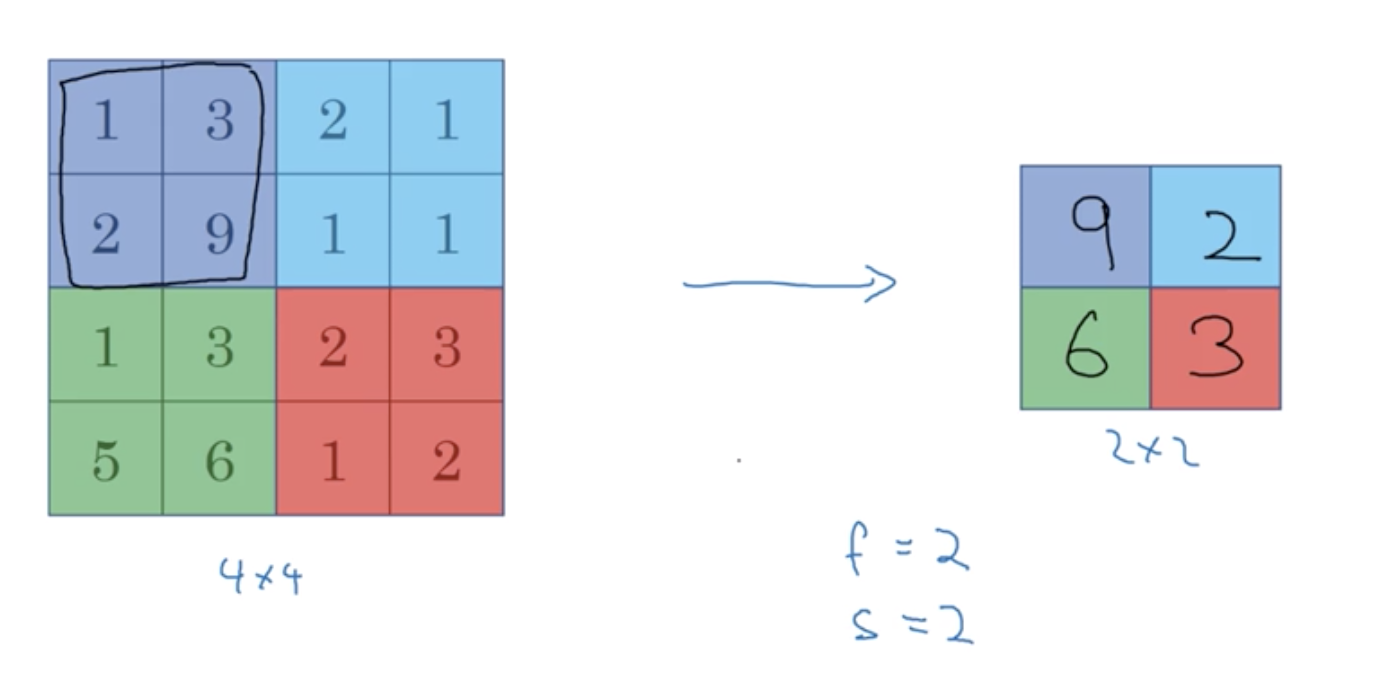
1
2
3
49 == max(1, 3, 2, 9)
2 == max(2, 1, 1, 1)
6 == max(1, 3, 5, 6)
3 == max(2, 3, 1, 2)
So in this layer, its ouput width equals to (int)((416+ 1 - 2)/2 + 1), 208. And the number of its output channels equals to the number of input channels. Now, we know its output volume size is 208 X 208 X 16. There is no parameter to be learned.
input volume size:
$$ n_H . n_W . n_c$$
$n_c$ : the number of channels
output volume size:
$$(\frac{n_H + padding-f}{stride} + 1) . (\frac{n_W + padding-f}{stride} +1) . n_c$$
$f$: the width or height of a filter
Pooling Layers - Foundations of Convolutional Neural Networks | Coursera
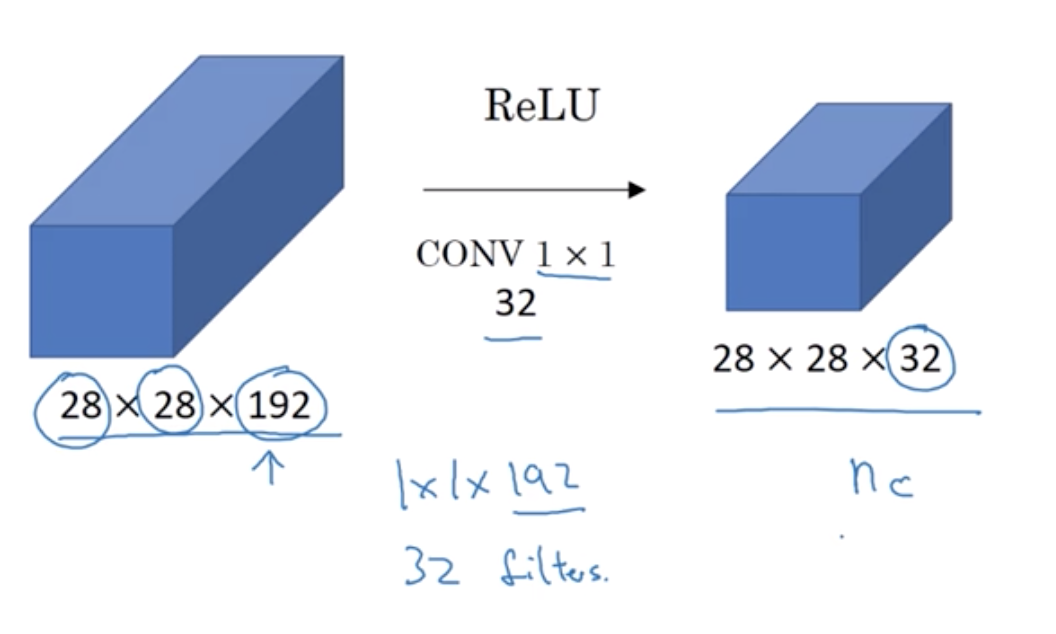
Why does 1 x 1 convolution do?
Networks in Networks and 1x1 Convolutions - Deep convolutional models: case studies | Coursera
For example, in this picture, the number of input volume channels ,192, has gotten too big, we can shrink it to a 28x28x32 dimension volume using 32 filters that are 1x1x192. So this is a way to shrink the number of channels .
In YOLO, it implements fully connected layer by two convolutional layer.
1 | [convolutional] |
Convolutional Implementation of Sliding Windows - Object detection | Coursera
scan qr code and share this article